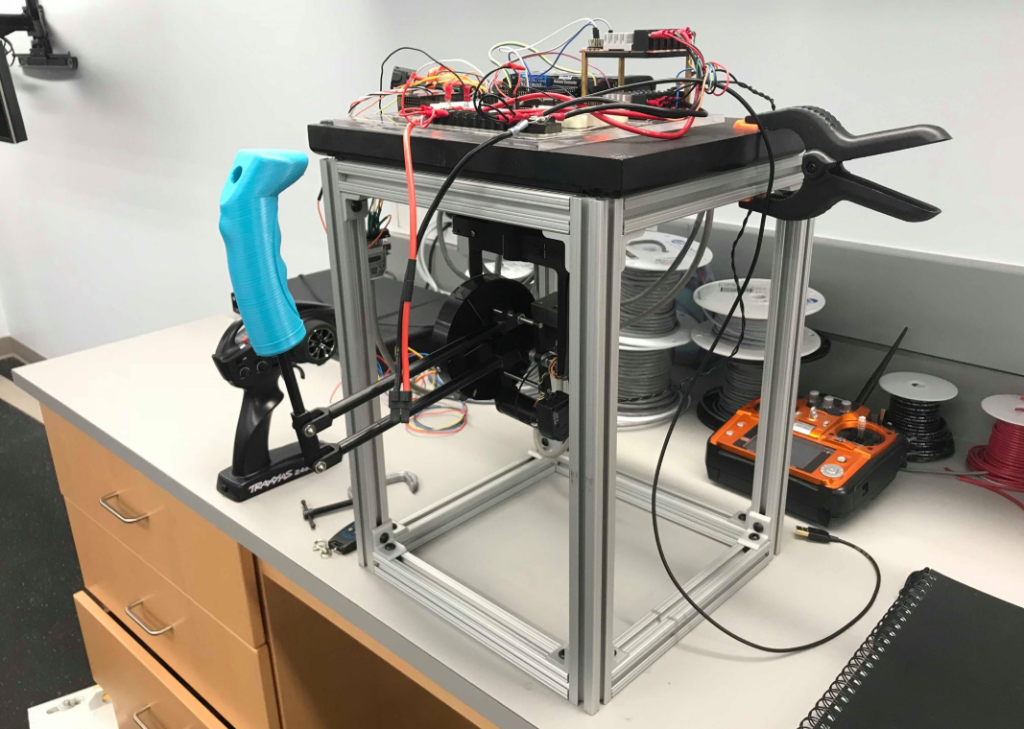
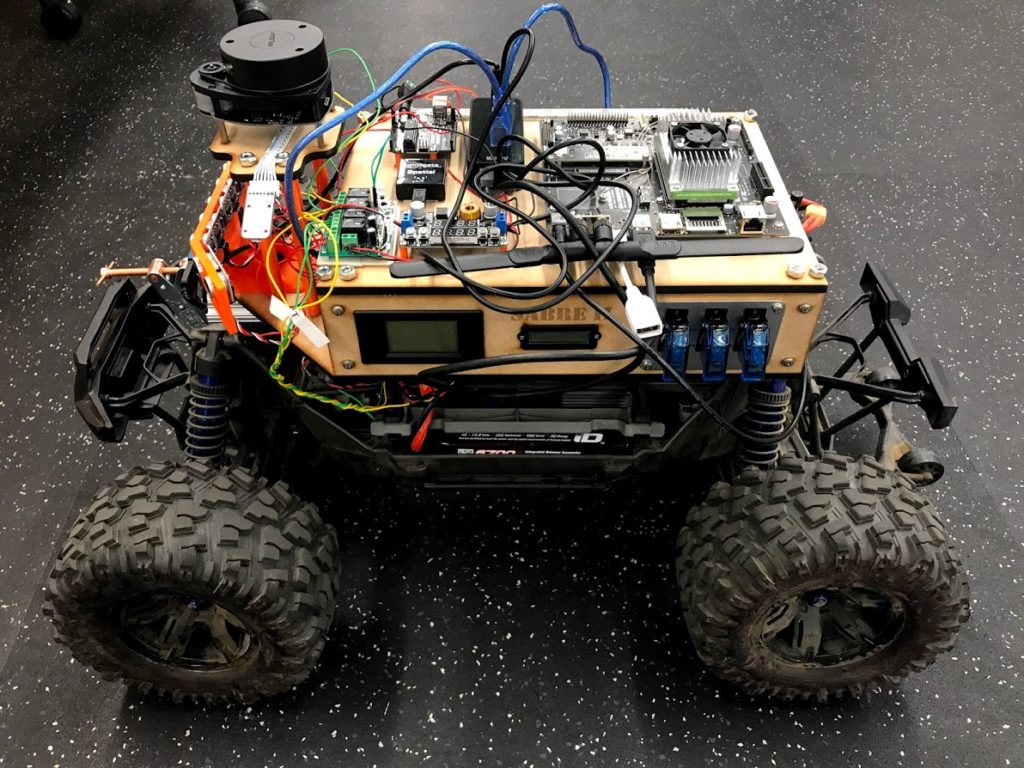
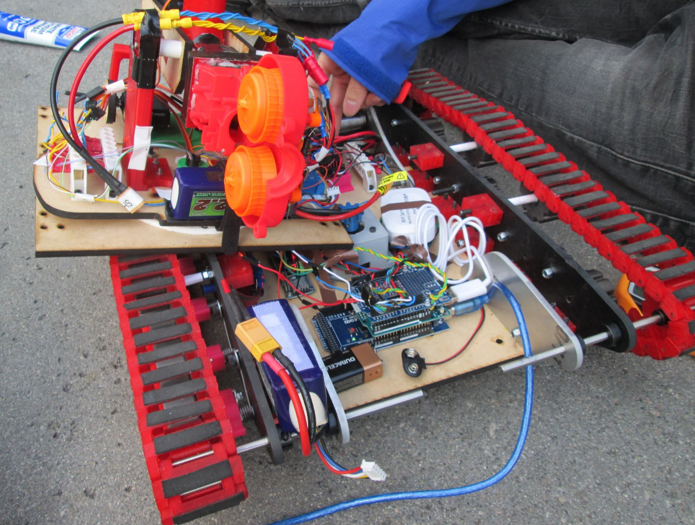
These skid-steer tank robots were built as a part Caltech’s ME72, a mechanical engineering capstone course taught by Dr. Michael Mello. Our team name was “Ring of Fire”, with members Cormac O’Neill (now a fellow grad student at MIT!), James Deacon, and Hana Keller. I was watching Game of Thrones at the time, which explains the robot names (there were three identical ones).
This is when I started to seriously delve into mechanical design, and remember spending many all-nighters trying to fix tons of failure modes. I’ll never forget the night I was pulling off an all nighter with Cormac to work on one of these robots, and one of the on-board regulators suddenly blew up in a puff of unhealthy-smelling smoke!
")